

前言
这个任务调度模块的实现是形成于毕设项目中的,用在STM32中,断断续续跨度2个月实现了一些基本功能,可能后面再做其他项目时会一点点完善起来,也会多学习相关知识来强化模块的实用性和高效性,毕竟用自己自主实现出来的功能还是蛮舒心的。
任务调度模式结构
整体上的结构属于线性结构,结合链表和定时器来实现,我使用的是sysTick这个滴答时钟,1ms的频率,功能比较简单,容易理解。
分片
分片的模式,主要体现在函数分片和时间分片在我之前就有使用在函数中,主要的思路是,把函数功能切片,分为几个小部分,每次执行时按次序执行小部分,对于没有时序要求的函数来说,可以把一个占用CPU大的功能分摊开来实现,从而避免有些地方耗时长的问题。对于时间分片,其实就是定时器的一种应用,实际上,函数分片在执行的时候已经是一种时间分片了,不过现在加上人为的控制在里面了。
下面是函数分片的一般结构:
void func(char *fos,...){
static char step=0;//顺序控制变量,自由度比较高,可乱序,可循环,可延迟执行
switch(step){
case 0:{
//...
step++;
break;
}
case 1:{
//...
step++;
break;
}
//...
default:{
//step++;//可以借助default实现延时的效果,即跳过几次空白step
break;
}
}
return;
}
其中添加的参数变量*fos是必要的,因为就是通过传入每个任务的这个标志位来判断是否运行结束,而其他的参数,就得基于具体任务做不一样的处理了。
轮询
- 运行框图
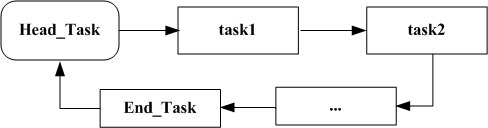
可以看到这个框图是一个头尾相连的闭环结构,从头节点依次运行到尾节点后再从头循环往复执行下去。
- 轮询函数
void loop_task(void){
static Task_Obj *tasknode;
tasknode=task_curnode->next;//repoint the curnode to the next
if(tasknode==NULL){//tasknode is null,only the headnode have the attr
return;//express the task space is none
}
else if(tasknode->task_type==TYPE_HEAD){//tasknode is headnode
task_curnode=tasknode;
return;
}
else{
if(tasknode->run_type == RUN_WAIT){
//等待型任务,通过ready标志来确定是否执行,否则就跳过
if(!tasknode->ready){
if(task_curnode->next !=NULL){
task_curnode=task_curnode->next;
return;
}
}
}
if(tasknode->task_status==STATUS_INIT){
tasknode->tickstart=HAL_GetTick();//获取tick
tasknode->task_status=STATUS_RUN;
}
else if(tasknode->task_status==STATUS_RUN){
if((HAL_GetTick() - tasknode->tickstart) > (uint32_t)tasknode->task_tick){
tasknode->task_name(&(tasknode->task_fos));//run the step task,transfer the fos
tasknode->tickstart+=(uint32_t)tasknode->task_tick;//update the tickstart
}
}
}
if(tasknode->task_fos==FOS_FLAG){
tasknode->ready=0;
if(tasknode->waittask!=NULL){
//置位该任务绑定的等待的任务准备运行标志位,标识可以准备运行了
tasknode->waittask->ready=1;
}
//运行结束就删掉该任务
delete_task(tasknode);
}
else if(tasknode->task_fos==FOC_FLAG){
//循环运行该任务
tasknode->task_status=STATUS_INIT;//continue running from start
tasknode->task_fos=0;//RESET fos
}
if(task_curnode->next !=NULL){
if(task_curnode->next->run_type==RUN_FORCE) return;//force-type's task
else task_curnode=task_curnode->next;
}
}
其中有几个运行态和标志位
#define FOS_FLAG 99//运行结束标志
#define FOC_FLAG 100//运行结束后再次执行,相当于循环运行
#define TYPE_NOMAL 0//标识一般任务类型
#define TYPE_HEAD 1//标识头任务类型
#define TYPE_END 2//标识尾任务类型
#define RUN_NORMAL 0//一般轮询模式
#define RUN_FORCE 1//强制运行该任务,运行结束才继续下一个任务
#define RUN_WAIT 2//等待指定的任务结束,才可以被运行
#define STATUS_INIT 0//任务的准备阶段,用于获取起始时间
#define STATUS_RUN 1//任务运行阶段
#define STATUS_UNVAILED 2//无效状态
运行时对时间间隔tick的把握还有点问题,这个等待后面有机会优化下。
调度实现
- 任务链表结构
typedef struct TASK_CLASS{
void (*task_name)(char *taskfos,...);//任务函数
int task_tick;//任务的时间分片间隔
uint32_t tickstart;//起始时间点,每次执行完须加上一个tick
char task_fos;//运行结束标志
char task_type;//任务类型变量
char task_status;//任务状态
char run_type;//运行状态
char ready;//准备运行标志位
struct TASK_CLASS *next;//下一任务
struct TASK_CLASS *waittask;//等待执行的任务
} Task_Obj;
-
添加任务
- add_task
void add_task(void (*taskname)(char *,...),int tasktick,int runtype){//可变参,这里未做处理 Task_Obj *tasknode,*tmpnode; char i; tasknode = (Task_Obj*)malloc(sizeof(Task_Obj)); tasknode->task_name=taskname; tasknode->task_tick=tasktick; tasknode->task_fos=0; tasknode->task_status=STATUS_INIT;//initial status tasknode->task_type=TYPE_END; //set the new node to endnode tasknode->run_type=runtype; tasknode->next=&task_headnode;//the endnode point to the headnode tmpnode=&task_headnode; if(task_num==0){ tmpnode->next=tasknode; task_num++; return; } for(i=0;inext;//reach the endnode } tmpnode->task_type=TYPE_NOMAL;//turn the last endnode to the normal node tmpnode->next=tasknode; task_num++; } - add_wait_task
void add_wait_task(void (*taskname)(char *),void (*waitname)(char *),int tasktick){ Task_Obj *tmpnode,*tasknode; char i,pos; tmpnode=&task_headnode; for(i=0;inext;//reach the endnode if(tmpnode->task_name==taskname){ pos=i;//获取要等待任务的位置 break; } } tasknode = (Task_Obj*)malloc(sizeof(Task_Obj)); tasknode->task_name=waitname; tasknode->task_tick=tasktick; tasknode->task_fos=0; tasknode->task_status=STATUS_INIT;//initial status tasknode->task_type=TYPE_END; //set the new node to endnode tasknode->run_type=RUN_WAIT;//任务为等待运行 tasknode->ready=0; tasknode->next=&task_headnode;//the endnode point to the headnode tmpnode->waittask=tasknode;//获取新建的等待执行的任务地址,在运行结束后把等待执行的任务的准备运行标志位置1 tmpnode=&task_headnode; if(task_num==0){ tmpnode->next=tasknode; task_num++; return; } for(i=0;i next;//reach the endnode } tmpnode->task_type=TYPE_NOMAL;//turn the last endnode to the normal node tmpnode->next=tasknode; task_num++; } -
删除任务
- delete_task(局限性大,只针对当前运行的任务而言)
void delete_task(Task_Obj *taskobj){ if(task_curnode->task_type==TYPE_HEAD && task_num next=NULL; } else{ task_curnode->next=taskobj->next;//repoint the curnode next } free(taskobj);//free the space of where the taskobj pointed task_num--; }- delete_task_withname(删除指定任务名的任务)
void delete_task_withname(void (*taskname)(char *)){ Task_Obj *tmpnode,*tmpnode2; char i,pos; tmpnode=&task_headnode; for(i=0;inext;//reach the endnode if(tmpnode->task_name==taskname){ pos=i; break; } } if(i==task_num) return; tmpnode=&task_headnode; for(i=0;i next; } if(tmpnode->next==NULL){//if tmpnode is endnode tmpnode2->next=&task_headnode; } else{ tmpnode2->next=tmpnode->next;//repoint the curnode next } task_num--; free(tmpnode); } -
初始化任务空间
void non_task(char *taskfos){
return;
}
void init_taskspace(void){
task_headnode.task_name=non_task;
task_headnode.task_type=TYPE_HEAD;
task_headnode.task_status=STATUS_UNVAILED;
task_headnode.next=NULL;
task_curnode=&task_headnode;//头节点是没有任务需要执行的
task_num=0;
}
- 调用实例
add_task(task1,500,RUN_NORMAL);//500ms执行一次task1任务
add_wait_task(task1,task2,500);//task2等待task1结束才会执行,运行的时间间隔为500ms
delete_task_withname(task1);//删除task1任务
while(1){
//...
loop_task();//任务轮询
}
结语
整体实现说难不难,说简单不简单,但也是我第一次尝试这种偏向系统级应用的代码,而且都没有参照任何其他的资料和代码,完全以自己的对任务的理解和具体项目的需求来一点点实现,希望后面会把这个调度的代码进一步完善成一个通用型的调度方式,也方便后面项目的使用了。
